Description
SMART-CLSA1 is a small desktop robot featuring short work cycle, reliable operation and high cost performance. It is widely used for various experimental teaching platforms and the students’ repair, disassembly and assembly co u rses . experimental teaching platform which realizes sorting and positioning of materials in combination with computer visual identification.
Main Applications
01
Materials Handling
02
Parts Transfer
03
Machine Management
04
Testing
05
Gluing
06
Assembly
Character
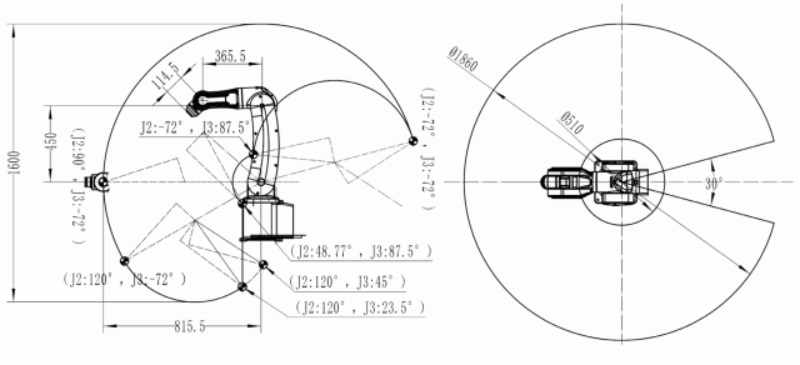
Robot Motion Range
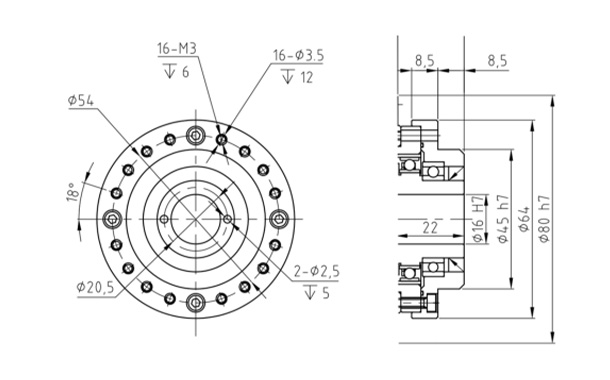
Robot Flange Connection
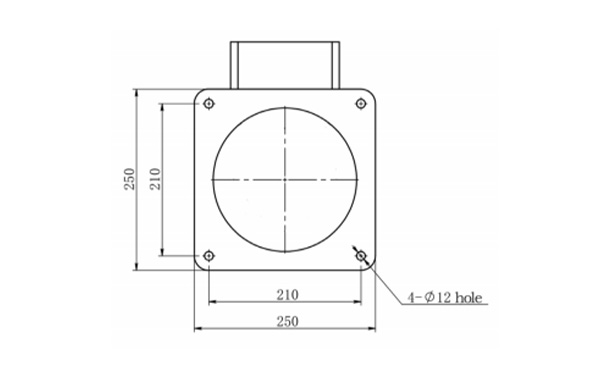
Robot Base Installation
Technical Data
| Payload | 5KG | |
| Reach | 990mm | |
| Structure | Articulated | |
| Number of axes | 6 | |
| Repeatability | ±0.03mm | |
| Max. motion range | Axis 1 | ±165° |
| Axis 2 | +120°/-70° | |
| Axis 3 | +85°/-100° | |
| Axis 4 | ±185° | |
| Axis 5 | +30°/-240° | |
| Axis 6 | ±360° | |
| Max. speed | Axis 1 | 225°/sec |
| Axis 2 | 225°/sec | |
| Axis 3 | 225°/sec | |
| Axis 4 | 225°/sec | |
| Axis 5 | 225°/sec | |
| Axis 6 | 225°/sec | |
| Weight | =55kg | |
| Mounting type | Ground,bracket,ceiling | |
| Ambienttemperature | 5°C~45℃ | |